Daftar Isi
Survey batimetri adalah survey pemetaan untuk mengetahui topografi dasar perairan dengan metode pemeruman menggunakan gelombang suara dengan alat ukur berupa Echosounder. Sistem penentuan posisi horisontal dilaut yang digunakan adalah sistem penentuan posisi berbasis satelit dengan metode Real Time Kinematic Differential Positioning menggunakan base atau titik referensi yang telah dibuat sebelumnya (BM).
Penentuan posisi pada survey batimetri terbagi menjadi dua, penentuan posisi horisontal menggunakan Receiver GNSS dan terikat pada sisitem koordinat base, sedangkan penentuan posisi vertikal dari hasil pemeruman didapatkan jarak dasar permukaan terhadap Transducer.
Data Kedalaman sebagai Dasar Keputusan Proyek Laut
Dalam proyek yang melibatkan perairan—seperti pelabuhan, dermaga, reklamasi, maupun alur pelayaran—data kedalaman bukan sekadar angka hasil pengukuran. Data ini menjadi dasar penentuan elevasi struktur, keselamatan navigasi, serta kelayakan desain secara keseluruhan.
Kesalahan dalam memahami kondisi dasar perairan dapat berdampak langsung pada perubahan desain di tengah proyek, risiko kapal kandas, hingga pembengkakan biaya konstruksi. Oleh karena itu, survey batimetri tidak diposisikan sebagai kegiatan pengukuran semata, melainkan sebagai bagian dari pengendalian risiko teknis sejak tahap perencanaan.
Kapan Survey Batimetri Menjadi Krusial dalam Proyek
Survey batimetri menjadi krusial ketika keputusan desain dan operasional bergantung langsung pada kondisi dasar perairan, bukan pada asumsi atau data sekunder.
Beberapa kondisi yang umumnya membutuhkan data batimetri yang andal antara lain penentuan elevasi dan posisi struktur laut, perencanaan reklamasi atau pekerjaan pengerukan, evaluasi alur pelayaran, serta pekerjaan konstruksi di perairan dangkal yang sensitif terhadap perubahan pasang surut.
Pada tahap ini, yang dibutuhkan bukan sekadar kedalaman rata-rata, melainkan kedalaman yang telah dikoreksi dan terikat pada sistem referensi yang dapat dipertanggungjawabkan untuk desain maupun keselamatan.
Apa yang Sebenarnya Diukur dalam Survey Batimetri
Dalam survey batimetri, yang dihasilkan bukan hanya informasi kedalaman mentah. Data batimetri merupakan kombinasi antara posisi horizontal titik pengukuran dan kedalaman yang telah melalui serangkaian koreksi, sehingga dapat digunakan secara langsung dalam perencanaan teknis.
Pengukuran kedalaman dilakukan melalui metode pemeruman menggunakan gelombang suara dengan alat echosounder, sementara posisi horizontal ditentukan menggunakan sistem penentuan posisi berbasis satelit dengan metode Real Time Kinematic (RTK) yang terikat pada titik referensi darat (BM).
Dengan pendekatan ini, setiap titik kedalaman memiliki keterikatan spasial yang jelas dan konsisten terhadap sistem koordinat yang digunakan dalam desain.
Mengapa Data Batimetri Tidak Bisa Diambil Sembarangan
Data batimetri yang digunakan untuk desain dan keselamatan harus mempertimbangkan kondisi muka air laut yang selalu berubah. Oleh karena itu, pengukuran kedalaman tidak dapat dilepaskan dari pengaruh pasang surut dan referensi elevasi yang digunakan.
Secara prinsip, koreksi pasang surut diperlukan untuk memastikan bahwa kedalaman yang dihasilkan mengacu pada datum yang sama dan dapat dibandingkan secara konsisten.
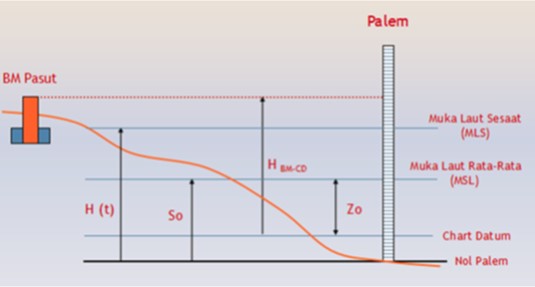
Kp (t) = H (t) – So + Zo
- Kp (t): koreksi pasut
- H (t): tinggi muka laut saat t terhadap nol palem (MLS)
- So: tinggi muka laut rata-rata (MSL) terhadap nol palem
- Zo: kedudukan Chart Datum di bawah MSL
Pengamatan Pasang Surut
Pengamatan pasang surut dilakukan melalui pengukuran muka air laut secara periodik, umumnya setiap 15 menit selama 24 jam atau lebih. Data ini digunakan untuk memahami fluktuasi muka air laut yang terjadi selama kegiatan survey.
Informasi pasang surut tidak hanya penting untuk koreksi kedalaman, tetapi juga menjadi dasar dalam perencanaan elevasi bangunan laut serta pertimbangan keselamatan navigasi kapal.

Pengamatan Pasang Surut
Pengukuran Kedalaman
Pengukuran kedalaman dasar perairan dilakukan menggunakan echosounder tipe Single Beam Echosounder (SBES). Alat ini bekerja dengan memancarkan gelombang suara ke dasar perairan dan menerima kembali pantulan gelombang tersebut.
Dengan menghitung waktu tempuh dan kecepatan rambat gelombang suara di dalam air, jarak antara transducer dan dasar perairan dapat ditentukan sebagai kedalaman.

Koreksi Barcheck dan Sound Velocity Profiler (SVP)
Koreksi barcheck dilakukan untuk memverifikasi hasil pengukuran echosounder terhadap kedalaman aktual. Nilai koreksi ini digunakan untuk memastikan bahwa data kedalaman yang diperoleh tidak menyimpang dari kondisi sebenarnya.
Sementara itu, pengukuran Sound Velocity Profiler (SVP) digunakan untuk mengakomodasi variasi kecepatan rambat gelombang suara di dalam kolom air. Tanpa koreksi ini, hasil kedalaman berpotensi mengalami distorsi.

Pengukuran Draft Transducer
Draft transducer merupakan jarak antara muka air laut dengan posisi transducer. Karena transducer berada di bawah permukaan air, koreksi draft diperlukan agar kedalaman yang dihasilkan mengacu pada muka air laut sesaat.
Pengukuran Heading Kapal dan Posisi Horizontal
Selain kedalaman, keandalan data batimetri juga ditentukan oleh ketepatan posisi horizontal setiap titik pengukuran. Untuk itu digunakan sistem penentuan posisi berbasis GNSS dengan metode Differential GPS (DGPS) dan RTK.
Peralatan GNSS ditempatkan tepat di atas transducer untuk meminimalkan offset posisi, dengan sistem base–rover yang terikat pada titik kontrol darat (BM).
Data Akhir yang Digunakan untuk Desain dan Keselamatan
Data kedalaman hasil survey batimetri diolah sehingga mengacu pada Chart Datum, yaitu permukaan laut terendah yang mungkin terjadi di lokasi survey.
Penggunaan Chart Datum bertujuan untuk memastikan bahwa, bahkan pada kondisi surut terendah, masih terdapat air yang cukup untuk keselamatan kapal serta sebagai referensi yang aman dalam desain struktur laut.
Ilustrasi Pengukuran Kedalaman
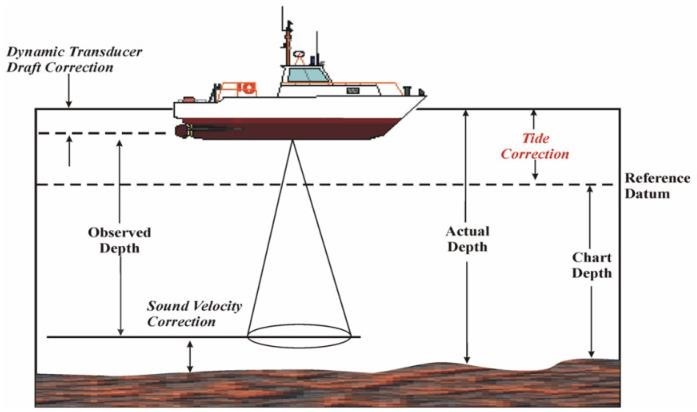
Ilustrasi pengukuran kedalaman menggunakan echosounder beserta koreksinya
Berdasarkan ilustrasi tersebut, kedalaman yang mengacu pada Chart Datum diperoleh melalui kombinasi kedalaman hasil pengukuran dan berbagai koreksi yang diterapkan selama survey.
D = dt + dT + db − Kp
- D: kedalaman yang mengacu ke Chart Datum
- dt: koreksi draft transducer
- dT: kedalaman hasil pengukuran transducer
- db: koreksi barcheck
- Kp: koreksi pasut
Peralatan Survey sebagai Pendukung Akurasi
I. ODOM CV100 DF
- Single Channel Configuration1 High: 100kHz-750kHz (manual tuning in 1-kHz steps)
- Low: 3.5kHz-50kHz (manual tuning in 1-kHz steps) variable receiver bandwidth
- Dual Channel Configuration High: 100 kHz-340kHz
- Low: 24 kHz-50kHz
- Resolution: 0.01m, 0.1 ft.
- Accuracy (corrected for sound velocity) 200kHz-
0.01 m +/- 0.1% depth; 33kHz-0.10 m +/- 0.1% depth - Output Power: Up to 300 watts RMS < 1 watt minimum
- Ping Rate: Up to 20Hz in shallow water (10m) range
- Depth Range From: <30cm to 600m (depending on frequency and transducer selected)
- Input Power Requirement: 9-32VDC < 15 watts
II. TRIMBLE R8s LT
Static
1. Horizontal : 3 mm + 0.5 ppm RMS
2. Vertical : 5 mm + 0.5 ppm RMS
RTK
Single Baseline <30 km
1. Horizontal : 8 mm + 1 ppm RMS
2. Vertical : 15 mm + 1 ppm RMS
Pertanyaan yang Sering Muncul Sebelum Mengambil Keputusan
Apakah semua proyek laut memerlukan tingkat ketelitian survey batimetri yang sama?
Tidak. Tingkat ketelitian survey batimetri sangat bergantung pada tujuan penggunaan data.
Proyek desain struktur, pekerjaan reklamasi, atau alur pelayaran memiliki kebutuhan ketelitian yang berbeda.
Menggunakan metode yang terlalu sederhana berisiko menghasilkan data yang tidak layak pakai,
sementara metode yang terlalu berlebihan dapat menyebabkan pemborosan biaya.
Kapan data batimetri lama tidak lagi layak digunakan?
Data batimetri lama perlu dievaluasi ulang ketika terjadi perubahan kondisi perairan,
seperti aktivitas pengerukan, sedimentasi, lalu lintas kapal intensif, atau perubahan garis pantai.
Dalam konteks desain dan keselamatan, penggunaan data yang sudah tidak representatif
dapat menyesatkan keputusan teknis meskipun data tersebut terlihat lengkap.
Apa risiko utama jika survey batimetri tidak direncanakan dengan benar sejak awal?
Risiko utamanya adalah keputusan desain yang dibangun di atas asumsi yang keliru.
Hal ini dapat memicu revisi desain di tengah proyek, gangguan operasional,
hingga potensi masalah keselamatan kapal dan struktur laut.
Perencanaan lingkup survey sejak awal membantu memastikan data yang dihasilkan benar-benar relevan
dengan kebutuhan proyek.
Konsultasi Teknis Survey Batimetri
Lingkup dan metode survey batimetri dapat berbeda untuk setiap proyek, tergantung pada tujuan penggunaan data, kondisi perairan, serta tingkat ketelitian yang dibutuhkan.
Untuk memastikan data yang diperoleh benar-benar mendukung keputusan teknis dan operasional proyek Anda, konsultasi sejak tahap awal menjadi langkah yang penting.
Informasi tentang Jasa Survey Batimetri, silakan menghubungi:
Komplek Rukan Mutiara Faza RB 1
Jl. Condet Raya No. 27, Pasar Rebo, Jakarta Timur, Indonesia
-
- ✉️ Email: kontak@hesa.co.id
- ☎️ Telepon Kantor: (021) 8404531 (Jakarta)
- 📱 Hotline HP: 081291442210 atau 08118889409
- 💬 WhatsApp (Pesan Cepat):